使用するステッピングモーター
 リニアアクチュエータ(D8-MOTOR80形搭載)仕様
駆動電圧DC 12V
1相あたり800アンペア/相
コイル抵抗15 10%Ω/相
ステップ角18。 / step
励磁法1-2相励磁
ドライブモードバイポーラドライバ
125pps
1600 ppsを超える最大応答周波数
最大開始周波数が1100 ppsを超える
モーター表面温度80°C
ねじ棒径3mm
ねじ棒の長さ90 mm
スライダストローク80mm
ねじ棒ピッチ±0.5mm
長さ10.3 cm / 4.1インチ
重さ50グラム(約)
リニアアクチュエータ(D8-MOTOR80形搭載)仕様
駆動電圧DC 12V
1相あたり800アンペア/相
コイル抵抗15 10%Ω/相
ステップ角18。 / step
励磁法1-2相励磁
ドライブモードバイポーラドライバ
125pps
1600 ppsを超える最大応答周波数
最大開始周波数が1100 ppsを超える
モーター表面温度80°C
ねじ棒径3mm
ねじ棒の長さ90 mm
スライダストローク80mm
ねじ棒ピッチ±0.5mm
長さ10.3 cm / 4.1インチ
重さ50グラム(約)

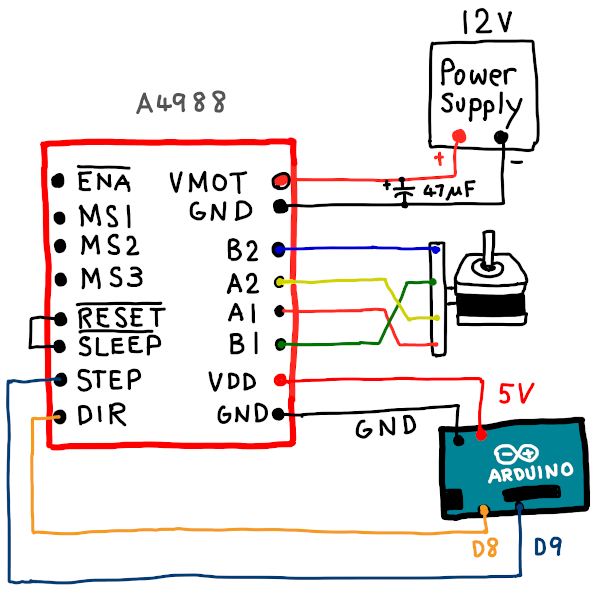
赤 → A+ 黄 → A- 青 → B+ 黒 → B-
A+ A- B+ B- はA4988ドライバに対して 1A 1B 2A 2Bとする
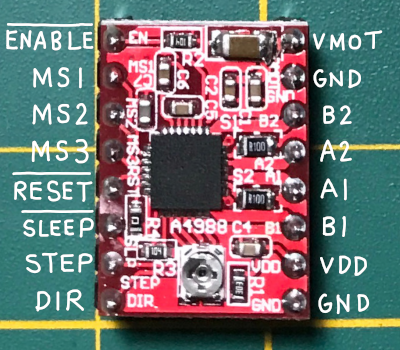
モータードライバー
A4988を使用
 配線図
配線図
ソース
const int DIR = 8; const int STEP = 9; void setup() { pinMode(DIR, OUTPUT); pinMode(STEP, OUTPUT); digitalWrite(DIR, LOW); digitalWrite(STEP, LOW); } void loop() { digitalWrite(DIR, HIGH); for (int i=0; i<200; i++) { digitalWrite(STEP, HIGH); delayMicroseconds(2000); digitalWrite(STEP, LOW); delayMicroseconds(2000); } delay(1000); digitalWrite(DIR, LOW); for (int i=0; i<200; i++) { digitalWrite(STEP, HIGH); delayMicroseconds(2000); digitalWrite(STEP, LOW); delayMicroseconds(2000); } delay(1000); }
stepdriver版
#include <A4988.h> const int MOTOR_STEPS = 200; const int DIR = 8; const int STEP = 9; float rpm = 10; int microsteps = 30; A4988 stepper(MOTOR_STEPS, DIR, STEP); void setup() { stepper.begin(rpm, microsteps); } void loop() { stepper.rotate(360); delay(1000); stepper.rotate(-360); delay(1000); }